AgroUnity
AgroUnity is a photorealistic simulator, based on Unity, developed for the generation of precision agriculture imagery for training of convolutional neural networks (CNNs) to be implemented in autonomous robots in farms.
Reference websites
This webpage gives a demonstration of what AgroUnity can do.
For installation visit AgroUnity’s github wiki.
For use documentation visit AgroUnity’s readthedocs documentation.
Publications
The performance of AgriUnity has been tested on multiple scientific experiments during the PhD development of Carlos Carbone in La Sapienza University of Rome. The results have been published in the following papers
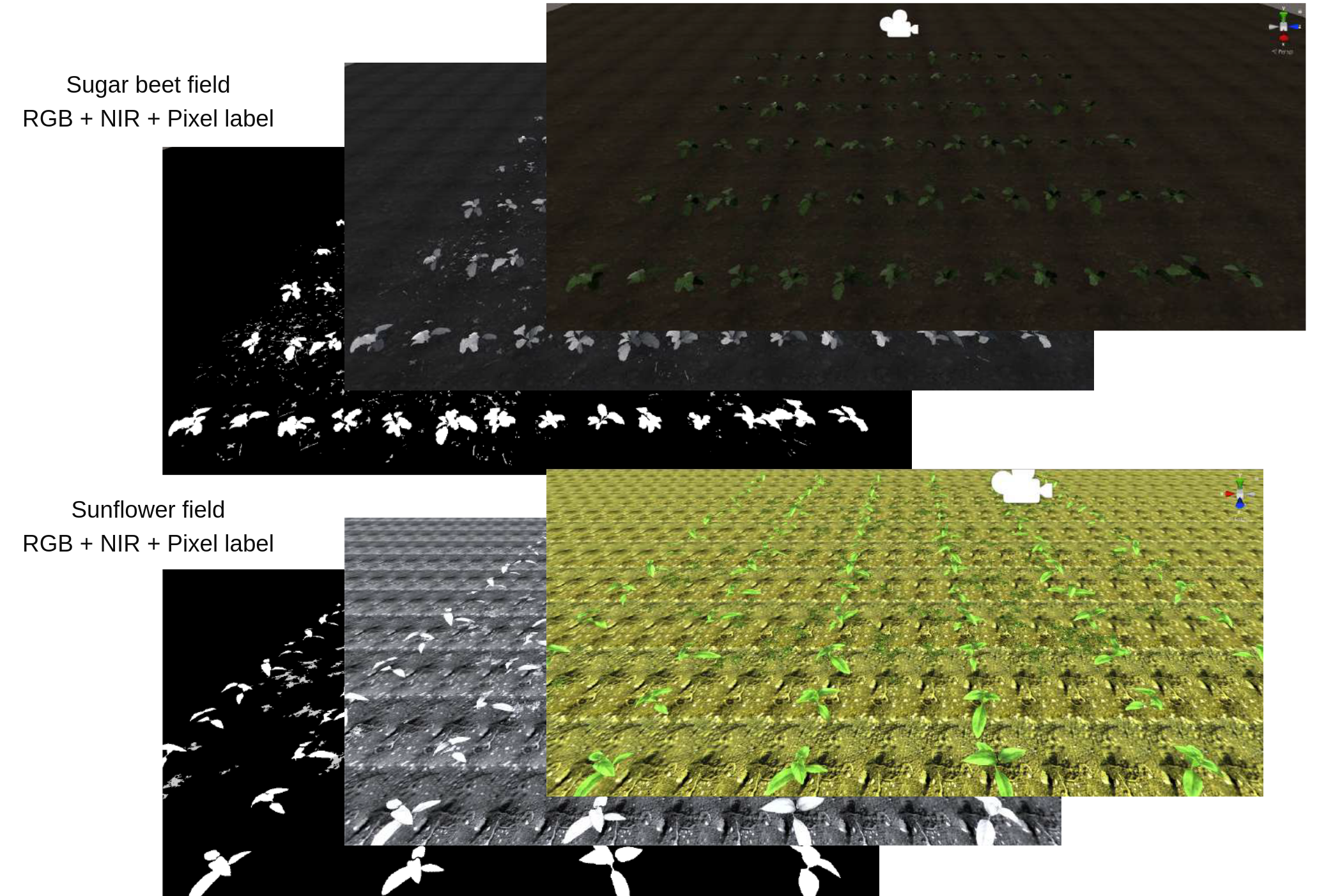
In our simulator we have been able to photorealisticly simulate sugar beets, potatoes and sunflowers. Preview images are shown on the following images:

The plants are spwaned procedurally and with additional scripts a complete field with multiple channels can be created.
In the simulator you can create your own fields. We are currently working on developing a more user friendly setup for custom fields
Other simulators
We developed AgriUnity to work in tandem with a swarm simulator that combines Gazebo with Unity. We call this simulator with high fidelity visuals and dynamics AgroSwarm
Check more at the AgroSwarm website
Additional developed tools can be found at: